Imperfect Image-Space Control Variates for Monte Carlo Rendering
Gwangju Institute of Science and Technology
ACM Transactions on Graphics (SIGGRAPH Asia 2025)
Abstract
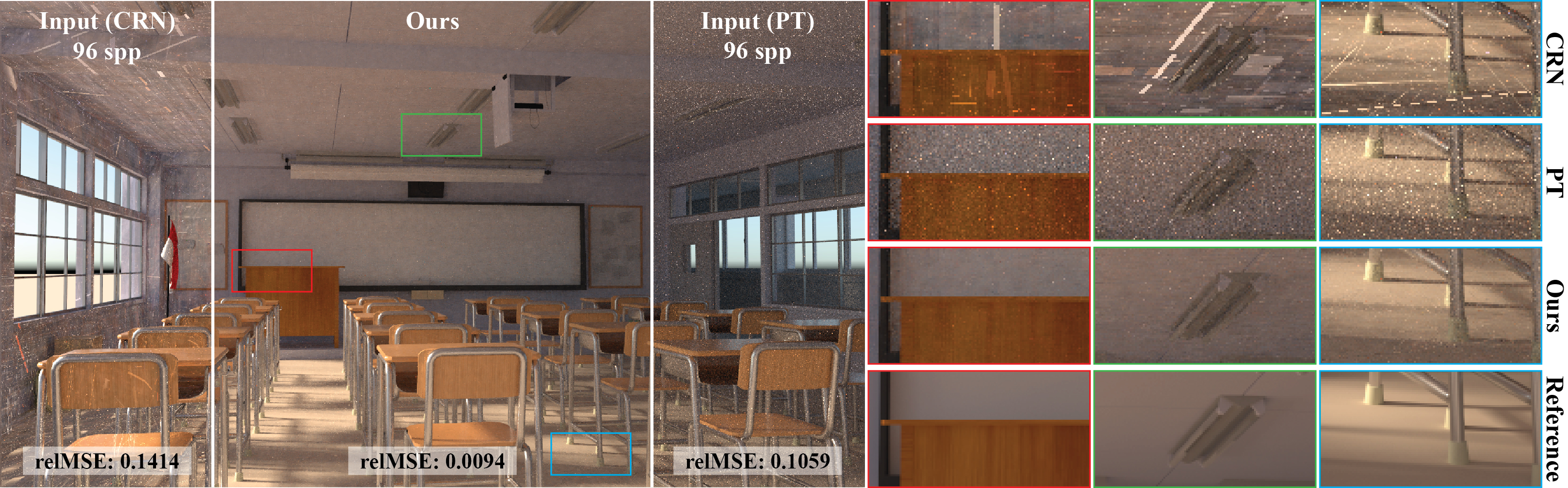
We present an image-space control variate technique to improve Monte Carlo (MC) integration-based rendering. Our method selects spatially nearby pixel estimates as control variates to exploit spatial coherence among pixel estimates in a rendered image without requiring analytic modeling of the control variate functions. Employing control variates is a classical and well-established technique for variance reduction in MC integration, typically relying on the assumption that the expectations of control variates are readily obtainable. When this condition is met, control variate theory offers a principled framework for optimizing their use by adjusting coefficients that determine the relative contribution of each control variate. However, our image-space approach introduces a technical challenge, as the expectations of the pixel-based control variates are unknown and must be estimated from additional MC samples, which are unbiased but inherently noisy. In this paper, we propose a control variate estimator designed to optimally leverage such imperfect control variates by relaxing the traditional requirement that their expectations are known. We demonstrate that our approach, which estimates the optimal coefficients while explicitly accounting for uncertainty in the expectation estimates, effectively reduces the variance of MC rendering across various test scenes.
Contents
BibTex
License
This work is licensed under a Creative Commons Atribution International 4.0 License.
